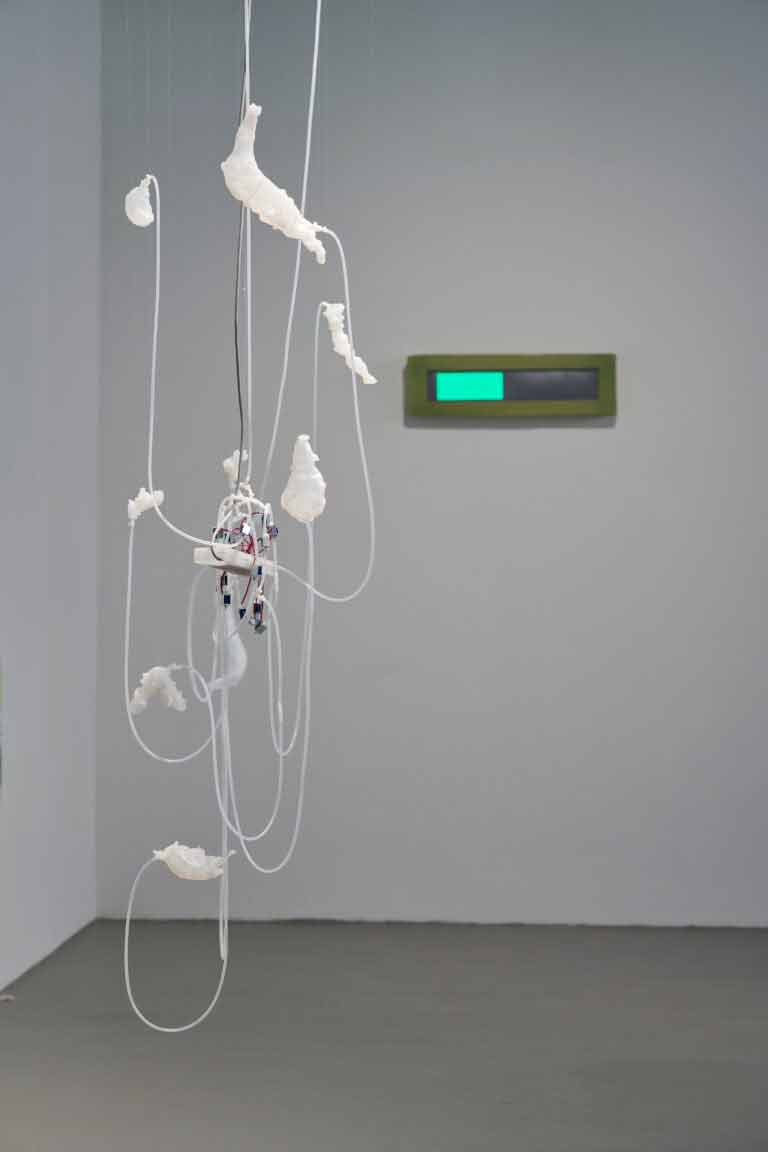
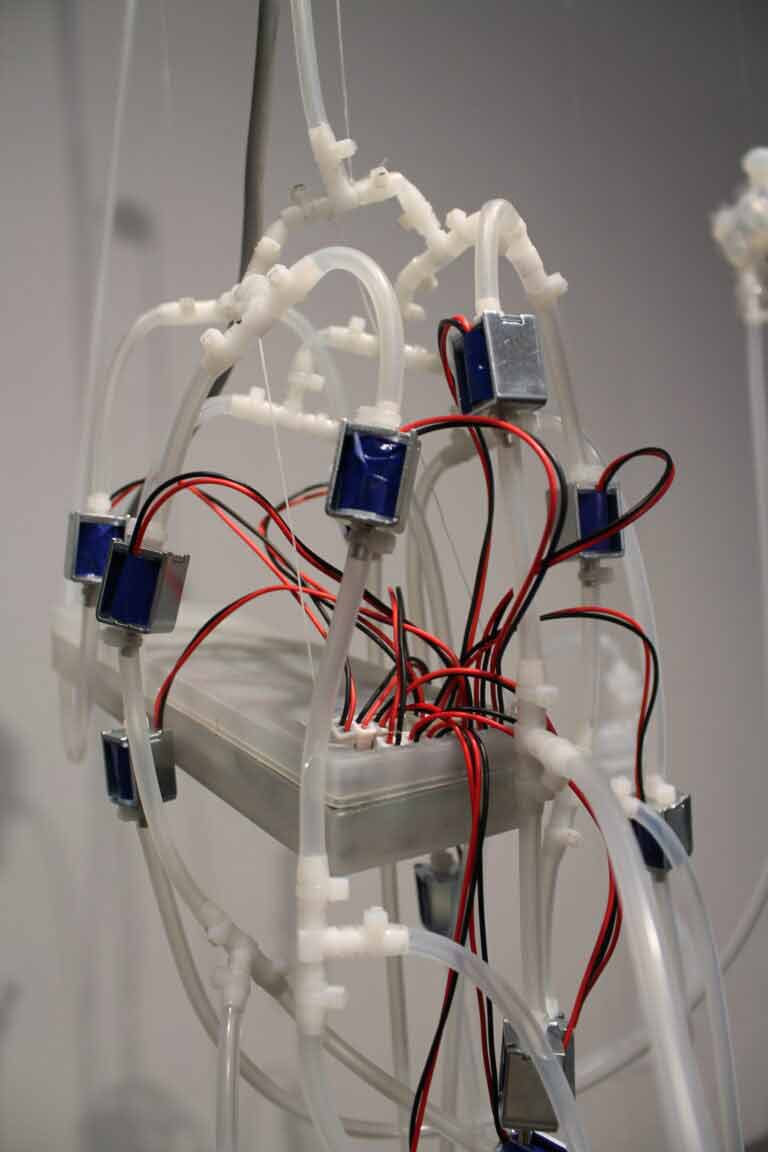
installation in collaboration with Jori Kehn Silicone, pressurised air, pneumatic tubing and valves, microcontroller
Inspired by the emerging field of soft robotics, which flexible materiality enables close contact of machinery and human body, silicone bodies fill with air and release it. Counteracting the plastic ideal of the productive augmented body and the technological promise of absolute control with organic forms, the typically elaborately structured air chambers controlling a soft robot are here replaced by silicone casts of driftwood. When inflated, these self contradicting shapes, appearing like transparent organs, twist and deform unpredictably. Their breathing motion, as well as the title of the work are reference to the exposed, unfiltered nature of breathing, which may relate to the inescapable condition of (micro)plastic pollution. The plastic appearance of the silicone bodies points to the transformative promises and crisis of synthetic material and the only superficial dichotomies between preservation and pollution, holding on and letting go, the permeability of human bodies to materials meant to keep away pathogens and the pollution caused by the human actor.
“Soft robotics”- is a relatively young field of robotic research enabling close contact of flexible machinery and humans. Replacing solid metal parts moving in a fixed range, its aim is to build elastic and malleable robots. Their movements are reminiscent of caterpillars, starfish or tentacles. Plastic is animated here by air pressure. Soft robotics are of great interest for medicine, especially for invasive surgery. In comparison to rigid older surgical robots, a flexible robot could navigate through a wide variety of structures in the human body. In addition to its possible use in surgical procedure, its materiality and therefore decreased risk of injury opens the possibility of a flexible exoskeleton. While this may aid in recovery of patients, for example after a leg fracture, more dystopian use cases are robotic exoskeletons improving the performance of human workers alongside traditional robots. However, “soft robots” are difficult to control precisely because of their flexibility and compliance. Their artificial vitality contrasts with the technological promise of absolute control.
ambivalent Symbiont
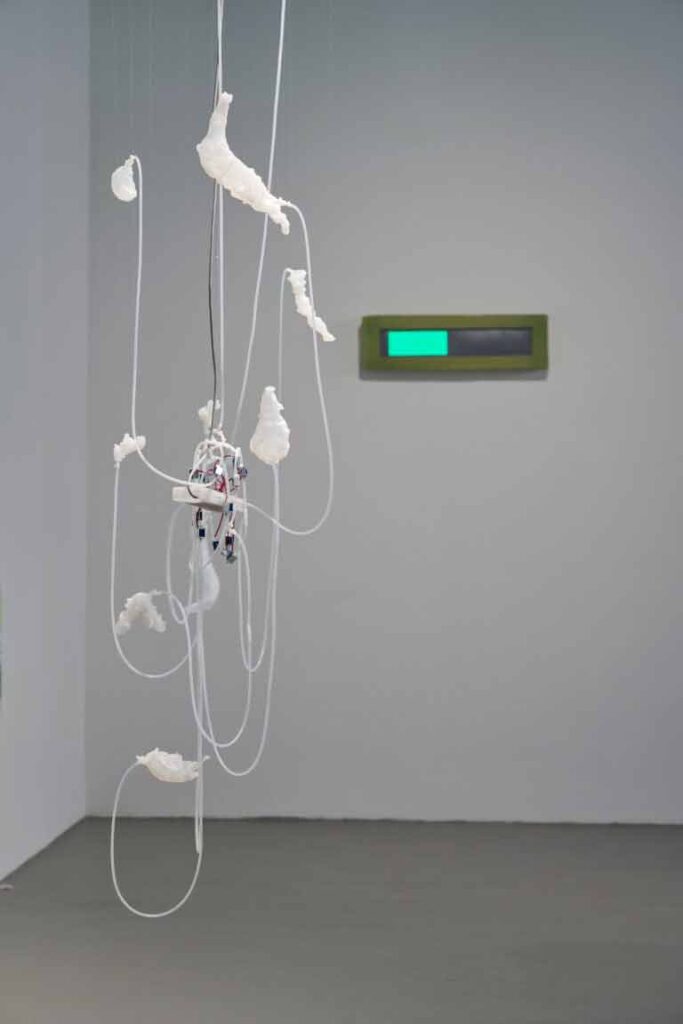
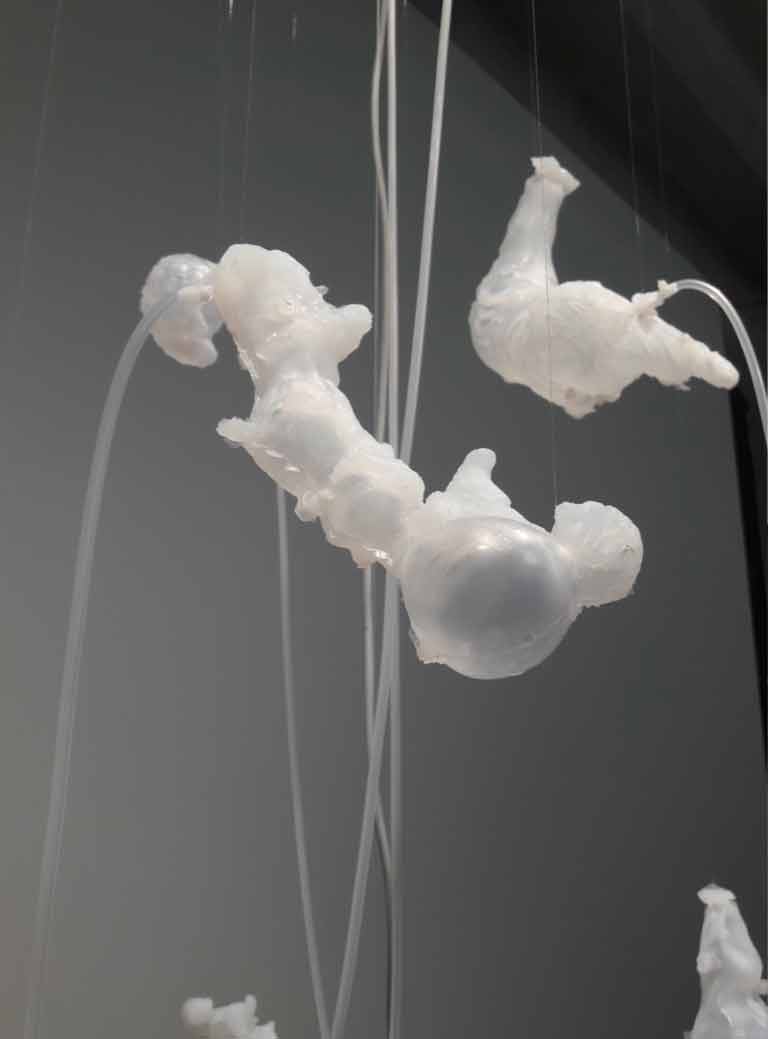
installation in collaboration with Jori Kehn Silicone, pressurised air, pneumatic tubing and valves, microcontroller
Inspired by the emerging field of soft robotics, which flexible materiality enables close contact of machinery and human body, silicone bodies fill with air and release it. Counteracting the plastic ideal of the productive augmented body and the technological promise of absolute control with organic forms, the typically elaborately structured air chambers controlling a soft robot are here replaced by silicone casts of driftwood. When inflated, these self contradicting shapes, appearing like transparent organs, twist and deform unpredictably. Their breathing motion, as well as the title of the work are reference to the exposed, unfiltered nature of breathing, which may relate to the inescapable condition of (micro)plastic pollution. The plastic appearance of the silicone bodies points to the transformative promises and crisis of synthetic material and the only superficial dichotomies between preservation and pollution, holding on and letting go, the permeability of human bodies to materials meant to keep away pathogens and the pollution caused by the human actor
ambivalent Symbiont
installation in collaboration with Jori Kehn Silicone, pressurised air, pneumatic tubing and valves, microcontroller
“Soft robotics”- is a relatively young field of robotic research enabling close contact of flexible machinery and humans. Replacing solid metal parts moving in a fixed range, its aim is to build elastic and malleable robots. Their movements are reminiscent of caterpillars, starfish or tentacles. Plastic is animated here by air pressure. Soft robotics are of great interest for medicine, especially for invasive surgery. In comparison to rigid older surgical robots, a flexible robot could navigate through a wide variety of structures in the human body. In addition to its possible use in surgical procedure, its materiality and therefore decreased risk of injury opens the possibility of a flexible exoskeleton. While this may aid in recovery of patients, for example after a leg fracture, more dystopian use cases are robotic exoskeletons improving the performance of human workers alongside traditional robots. However, “soft robots” are difficult to control precisely because of their flexibility and compliance. Their artificial vitality contrasts with the technological promise of absolute control.